
Stabilitatea în zbor depinde de trei lucruri: senzori corect calibrați (IMU, busolă, barometru), propulsie sănătoasă (motoare/elice/ESC) și mediu favorabil (GPS, lumină, vânt). Când unul dintre ele dă rateu, apar comportamente „ciudate”. Mai jos găsești cele mai frecvente simptome, ce le provoacă și cum le rezolvi rapid și în siguranță.
Cum arată „comportamentul instabil”
- Drift: drona „alunecă” singură într-o direcție în staționare, fără să își poată păstra poziția.
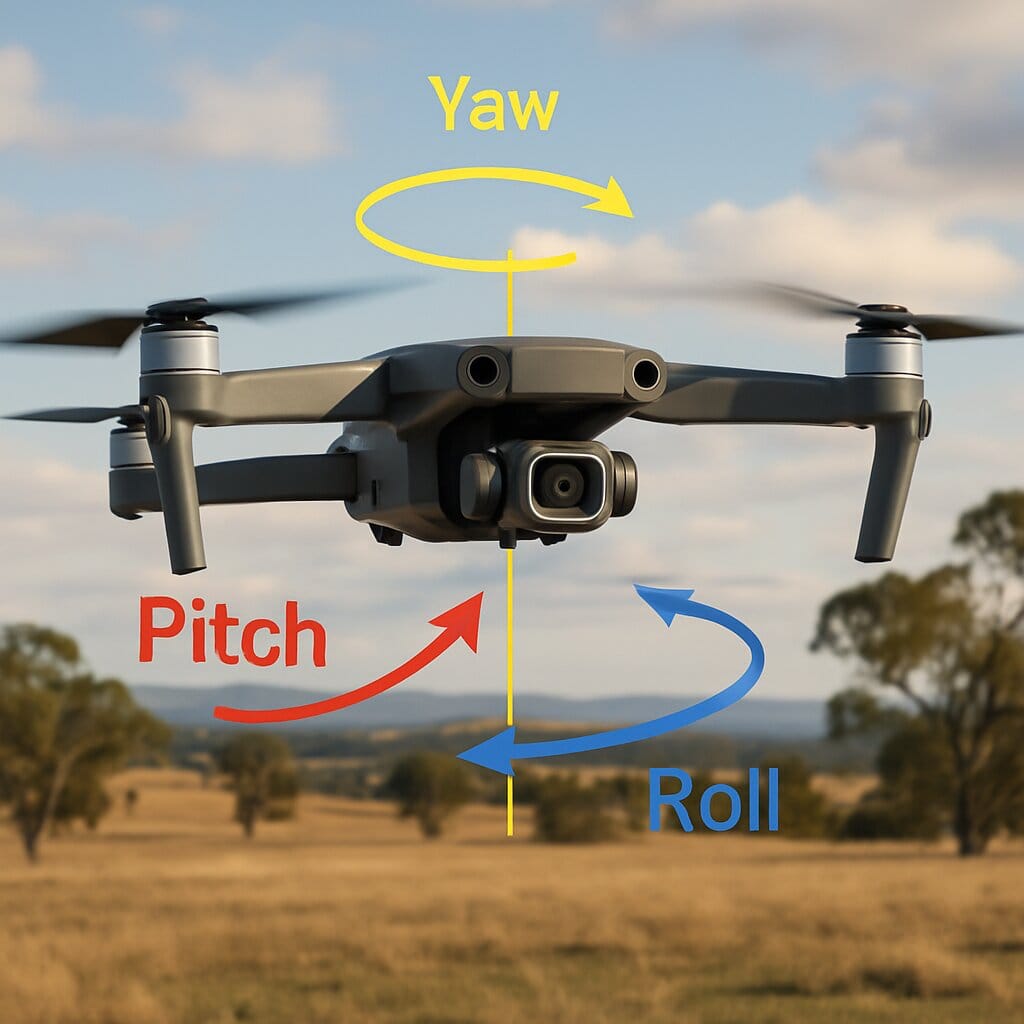
- Oscilații/„wobble”: vibrații sau legănări ritmice pe axele pitch/roll/yaw.
- „Bouncing” pe verticală: urcă/coboară câteva zeci de cm la plutire.
- „Yaw twitch”: smucituri scurte pe axa de rotație (stânga/dreapta).
- „ATTI feel”: pare că nu mai ține poziția (GPS slab/inexistent).
Notă: „jello” în imagine este, de regulă, o vibrație mecanică (elice/echilibrare), nu neapărat instabilitate de control – însă, de multe ori, cele două apar împreună.

Ghid rapid de diagnostic (5 minute)
1. Loc & mediu
- Ieși într-un spațiu deschis, fără metal/EMI, cu vânt moderat și suprafață uniformă (nu deasupra apei sau a suprafețelor lucioase).
- Așteaptă cel puțin 12 sateliți și mesajul „Home Point updated”.
2. Pre-flight check
- Elice intacte și corect potrivite (conform marcajelor), fără joc la hub.
- Bateria dronei/RC > 50%, temperatură normală (nu imediat scoase din frig/caniculă).
- Verifică în aplicație: IMU/Compass „Normal”.
3. Test hover (2–3 m altitudine, 5–8 m deasupra solului)
- Observă: ține poziția? Menține altitudinea? Există vibrații sau rotiri pe loc?
- Fă un yaw lent de 360° – apar smucituri?
- Fă un mic sprint înainte/înapoi – revine corect la punct?
Dacă nu trece testul, treci la secțiunile de mai jos, după simptom.

1) Drift / nu ține poziția
Cauze probabile
- Busolă perturbată sau calibrată greșit; IMU cu bias; GPS slab (multipath lângă clădiri).
- VPS (senzor optic) confuz de suprafețe lucioase, apă, modele repetitive sau lumină slabă.
Cum corectezi
- Recalibrează IMU pe o suprafață perfect plană, apoi recalibrează busola într-un câmp deschis, departe de metal, telefoane, mașini, beton armat.
- Mută-te la distanță de clădiri/mașini; așteaptă sateliți suplimentari (≥ 12).
- Dacă e întuneric, mărește altitudinea peste 3–5 m (VPS are nevoie de lumină și textură).
- Evită zborul fix deasupra apei, sticlei, acoperișurilor lucioase sau suprafețelor cu pattern repetitiv.

2) „Toilet bowl effect” (cercuri lente în jurul unui punct)
Cauze probabile
- Dezalinieri între busolă și GPS (busolă calibrată lângă metal sau cu „hard iron bias”).
- Interferențe magnetice la locul de decolare (capace de canal, armături, boxe, rucsac cu magneți).
Cum corectezi
- Schimbă locul de decolare (minimum 10–15 m față de sursa de metal).
- Recalibrează busola într-o zonă „curată” magnetic.
- Decolează, urcă la 5–10 m, stai pe loc 10–15 sec., verifică dacă se stabilizează.
- Dacă fenomenul persistă: recalibrare IMU + busolă, în această ordine.

3) Oscilații/legănări („wobble”, „hunting”)
Cauze probabile
- Elice deformate, microfisuri, dezechilibru; motor/lagăr cu joc sau murdărie.
- Vânt în rafale, efecte de margine (valuri de aer lângă clădiri/pante).
Cum corectezi
- Înlocuiește toate elicele ca set (nu doar una).
- Curăță motoarele de praf sau nisip; verifică jocul axial/radial.
- Fă testul în alt loc, cu vânt mai mic; evită zborul aproape de clădiri.
- Dacă a fost reparată recent: verifică la service parametrii de control (gain/tuning).
4) Sărituri pe altitudine („bouncing”) sau „coborâre/urcare” involuntară
Cauze probabile
- Barometru afectat de curenți calzi/soare direct sau presiune din carcasă.
- VPS (senzor optic) confuz (lumină slabă, apă, reflexii) sau murdar (praf, urme de degete).
Cum corectezi
- Curăță senzorii VPS (optici/IR) cu o lavetă din microfibră.
- Evită decolarea de pe suprafețe fierbinți (asfalt încins) sau în bătaia directă a soarelui pe carcasă; mută-te la umbră.
- Zboară peste 5 m altitudine dacă VPS te induce în eroare la 0,5–3 m.
- Recalibrează IMU (barometrul este integrat și se stabilizează mai bine după recalibrare).
5) Smucituri pe yaw („yaw twitch”) sau rotație lentă necomandată
Cauze probabile
- Perturbare de busolă/diferențe între direcția magnetică și cea calculată din IMU.
- Motor/ESC pe axa yaw care corectează excesiv din cauza vibrațiilor.
Cum corectezi
- Recalibrează busola și IMU (în această ordine), într-un loc „curat” magnetic.
- Verifică elicele și înlocuiește-le în set.
- Fă un hover la 3–5 m și un yaw lent; dacă dispare, era un artefact VPS/mediu.
- Dacă persistă: diagnoză ESC/motor în service.
6) Se simte „pe ATTI” (plutește liber, nu stă pe loc)
Cauze probabile
- GPS insuficient (umbrire, canioane urbane, multipath) sau conflict GPS/compass.
- VPS oprit sau nefuncțional (întuneric, suprafețe „neprietenoase”).
Cum corectezi
- Urcă peste obstacole (10–20 m) pentru cer mai deschis.
- Distanțează-te de clădiri/structuri; așteaptă sateliți suplimentari și fix („Home Point updated”).
- Activează VPS (dacă este disponibil) pentru menținere la joasă altitudine.
7) Derivă la accelerații/opriri (nu revine „curat” pe punct)
Cauze probabile
- IMU cu offset (nivel „zero” greșit), greutate/payload necentrat.
- Elice neuniforme (set mixat, diametre diferite la modele diferite).
Cum corectezi
- Recalibrare IMU pe o suprafață perfect plană.
- Scoate accesorii neomologate sau centrează payload-ul (filtre grele, brackete).
- Montează același model de elice, toate noi.
8) Instabilitate imediat după update/transport lung
Cauze probabile
- Parametri resetați parțial, senzori ieșiți din „sweet spot” după șoc termic.
- Conectori „semi-așezați” după vibrații la transport.
Cum corectezi
- „Power cycle” complet: pornește/oprește drona & RC + relink, dacă e cazul.
- Recalibrare IMU → busolă → gimbal (în această ordine).
- Verifică fixarea bateriei (clic ferm), brațele pliante, conectorii vizibili.
Greșeli frecvente care agravează instabilitatea (evită!)
- Calibrare busolă lângă metal, mașini, beton armat, telefoane.
- Calibrare IMU pe suprafețe înclinate sau în frig/caniculă.
- Zbor peste apă la < 3 m cu VPS activ, în lumină slabă.
- Folosirea de elice aftermarket de calitate necunoscută.
- Ignorarea mesajelor IMU/Compass/ESC în aplicație.
„Checklist” de corecție în ordine logică
- Înlocuiește elicele (set nou, original).
- Actualizează firmware-ul dronei și al RC-ului → repornește-le pe ambele.
- Recalibrare IMU (suprafață plană) → recalibrare busolă (câmp deschis).
- Curăță VPS; testează în lumină bună, fără apă/reflexii dedesubt.
- Relochează decolarea într-o zonă fără metal/EMI; așteaptă ≥ 12 sateliți.
- Test hover la 3–5 m; verifică drift/yaw/altitudine.
- Dacă simptomele persistă → diagnoză hardware (motor/ESC, barometru, placă).
Când să aterizezi imediat și să oprești zborul
- Mesaje ESC/Motor sau temperaturi anormale la motoare.
- Rotație necontrolată pe yaw sau pierdere repetată a altitudinii.
- Vibrații puternice vizibile în carcasă, nu doar în imagine.
- Miros de ars sau zgomote metalice din motoare.
Acestea indică un posibil defect hardware: continuarea zborului poate duce la prăbușire.
Concluzie
„Zborul ciudat” are, de obicei, o cauză clară: senzori scoși din aliniere, elice/motor cu probleme sau condiții de mediu nefavorabile. Urmează „checklistul” de mai sus — elice noi → update → IMU → busolă → VPS → test hover — și, în peste 80% din cazuri, comportamentul revine la normal. Dacă nu, este momentul pentru o diagnoză de service.
Felix ServDron: facem diagnoză completă, calibări corecte (IMU/compass/gimbal), verificăm motoare/ESC, VPS și barometru, cu raport clar al cauzei și soluției — ca drona ta să revină stabilă și sigură în aer.